оƬ��ُ�W��ע�����χ������ڙ�IC�����̬F؛�YԴ��оƬ��挍�r��ԃ���ИI�r���������ُ����ICоƬ�����Ȍ��IоƬ��ُƽ�_��
0 ����
����S���W�j��Ϣ���g�Ŀ��ٰlչ���˂����C늵��������о������룬�T�Ԍ������g�����®������Ƽ��g�ڑT�Ԍ���ϵ�y���������P��Ҫ�����ã�Ŀǰ�����ƽ�_�T�Կ��Ʋ��ý�����l������OӋ�������S�����Ƽ��g�İlչ������������ՓҲ�õ��˘O��İlչ�������ƌ���IJ��_���ԺͽY���z����и��õĿ���Ч�������IJ�������H����ƽ�_�����·�Ŀ��ƣ�ͨ�^�x����m�ę���������ƽ�_�����·�Ŀ��Ɔ��}�D����H�� ����`���Ȇ��}���û���`���ȃ����OӋ�˝M������Ҫ��Ŀ�������ͨ�^������p��׃�Q������Q��̓�S�O��ƽ�_�����·ԭϵ�y����ģ�͵IJ��톖�}����������Ŀ�����ͨ�^���Ŀ����ԡ�
1 Һ������ƽ�_������·��ԭ��
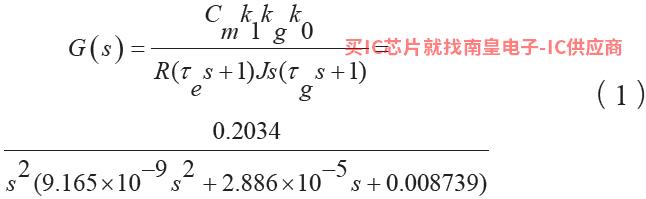
���S�T��ƽ�_�����l�ŷ���·ͨ������ԭ��������ͬ���ɔ_���ؕrM f ��������ƽ�_����S�r��ƽ�_���D�����T�Կ��g��Һ��������ƫ�D�Ƕ����к�ݔ���������{����̖���Ŵ����Ŵ�����o�����b�á������b���ڷ���늙C�Ϯa��������̖������늙C�a���෴�����У��Ť�أ���ƽ�_�Ƅӵ�ԭƫ�x���෴����ʹƽ�_�c�T�Կ��g�ĊA����u�p�ٵ�0����Kʹƽ�_�����ڑT�Կ��g���ַ�����
2 ƽ�_������·��ģ
2.1 ������·�ĽM��
һ�㷀���·�ɑT��ƽ�_�����h��ܡ����݃x��Ť��늙C������׃�Q���Ϳ����·�M�ɡ����w�M��Md Ť��늙C��Mf�����·�ⲿ�ɔ_���ء� �����·�əM�L�����·���������·�M�ɣ��o��ϷŴ������ŷ��ֽ�����

�D1 ��ƽ�_������·�M��
2.2 ���Wģ�ͷ�����·
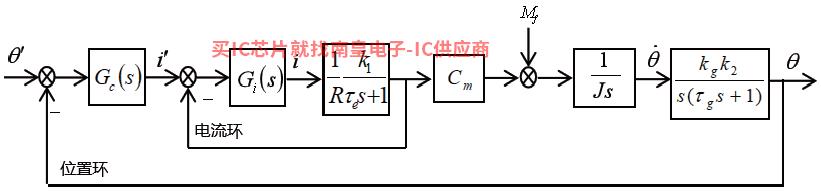
�D2 �����·���ƿ�D���� �� �����·ݔ��Ƕȣ��� ����ݔ���ǣ�k1 �Ŵ��ʽ����ϵ����k2 ���������ǰ�Ŵ��������{�͵�ͨ�V���Ŵ�ϵ������ g ���ݕr�g������kg ��ϵ�����f�o���ݣ��� e ��늙C�r�g������ J ��ƽ�_���D�T���������·���_�h��ݔ���������]У���b��
3 ��ҎPID����
PID �������ǿ���ϵ�y����õĿ����������нY�����Ρ��{�����㡢�����Ժá������ɿ��ȃ��c��PID ������Ҫ����������ϵ�y��ݔ��ֵ�cĿ��ֵ֮�g��ƫ��͌��H��ƽ�_�����·ͨ�������p�]�h���ƣ�������hPI ���ƣ�λ�íhPID ���ƣ����ƿ�D��
�D2 ������·�p�]�h����
3.1 ����hPI����
����h�������Ԅ��{��Ť��늙C�������������d�w���\�Ӻɔ_Ť�������Ť��늙Cݔ��Ť�ز��ӣ����ϵ�y���ܡ�
δУ����ǰ����h�_�h��ݔ����

����PI ���F����h���ƣ�������

�������̌��H��r���@��ȡ����h���_�h��ֹ�l�ʞ� 1 800~2 000 rad / s���˕r��ȡ����hУ������

�ɵ�����h�]�h���f����

�����Ӌ�㣬���Է��ӡ���ĸ�ĸ��Aϵ��헣�����ʽ������һ�A�h�����õ�ʽ��

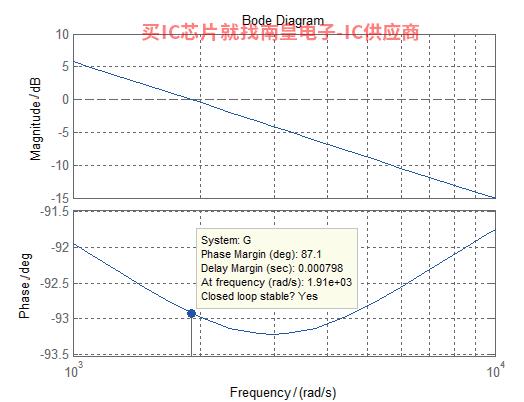
�������h��������h���_�hbode �D��
���ƺ��_�hϵ�y�Ľ�ֹ�l�ʞ� 1 910 rad / s����λԣ�Ȟ�87.1�㡣
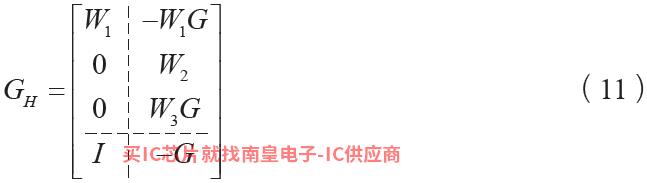
���У� S ��T �քe�Q���`���Ⱥ������a���`���Ⱥ��������ߝM�㣺T (s) = I ? S (s)���`���Ⱥ���S (s)�ǛQ����ۙ�`���С����Ҫָ�ˣ�S (s)����Խ�ͣ�ϵ�y��ۙ�`��ԽС��ϵ�y푑����|��ָ��Խ�ã��a���`���Ⱥ���T (s)�����Q����ϵ�yEpson�������ͷ����Ե���Ҫָ��T (s)������Ԝp��ģ�Ͳ��_���Ԍ�ϵ�y��Ӱ푡�T (s) = I ? S (s)��������ͬ�r����S��Tͨ���ɔ_��̖������l��̖��ϵ�y���_���l�����l��������x��ຯ���Ͽ��Ԍ������M�з��l�����ԡ�
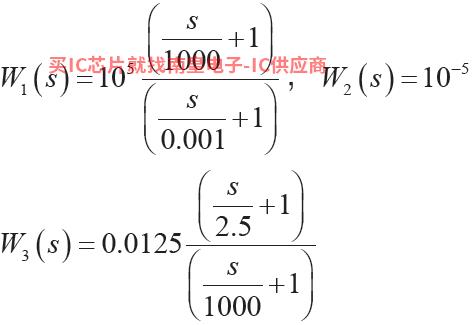
���У����V����ģ�͞�
���εõ����ε��ƌ���
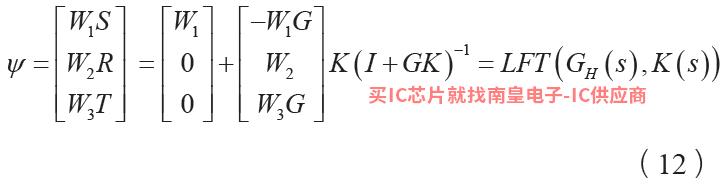
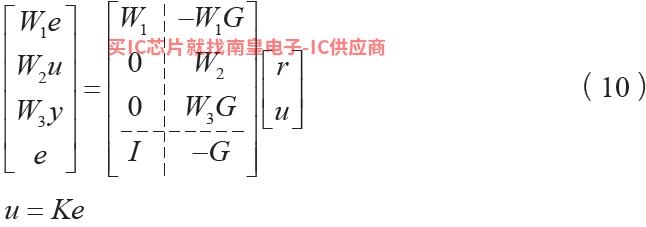
���Ҷ���Ŀ�˺����ľ��Է�ʽ׃�Q��ʽ����ˣ�����ϵ�y�Ȳ����M���OӋָ�˦� �� <1�Ŀ�����K (s)���}���Ԛw�Y�����ӱ��،���G s H( )��������H�� ��Q�˜��OӋ���}K (s)�Ć��}��
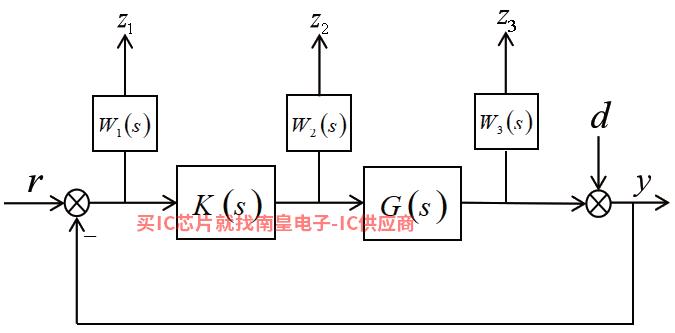
�ڱ����У��D5��G(s)�����،�����Ť��늙C��ƽ�_�w��Һ�����ݽM�ɣ�������wֵ��

���ՈD5 �O�ýo����̖0�Ļ���`���ȿ��ƽY���D2 ��Ч׃�Q��H�ޘ˜ʿ��ƽY������̓������һ���Uչ����������ԭʼ���ƌ��� G(s) W1 ��W2 ��W3 �����ຯ����
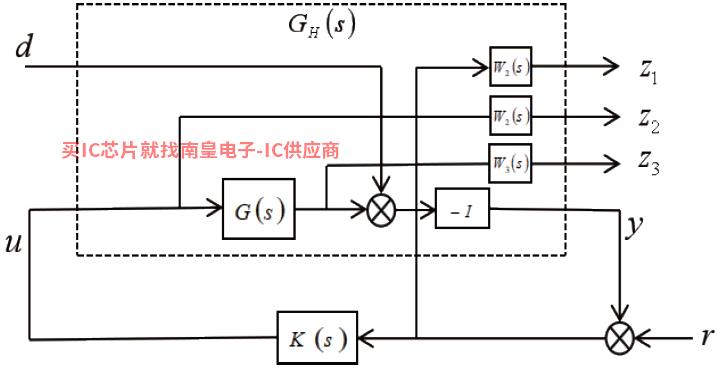
�D5 ������·H�Y���D�Ę˜ʿ���
5 ����`����H���OӋ������
5.1 �x��ຯ��
���OӋ�������r���ә�ꇵ��x������Ҫ�΄գ����Q����ϵ�y�`���Ⱥ������a���`���Ⱥ����l�����Ե��ΠȻ��ֱ�ӛQ��������ϵ�y�ĄӑB�������Ժ������ԡ��ә�ꇵ��x����ѭ����Ҏ�t��
1)��K�OӋ�Ŀ������c�V�x���،���ͬ�A������ڝM���OӋҪ�����r�£��M���p�ټә���е��A�Ρ�
2)�`���Ⱥ���S (s)���Q����ϵ�y�ĸ�ۙ���ܣ�ϵ�y���Ɣ_������ԽС��ϵ�y��ۙ����Խ�ã�
����
�D 7(a)(b) ����ϵ�y�`���Ⱥ���S(s)�͙ຯ��


�D7 �殐ֵ����
WS 1 ���M��ϵ�y��ۙ�ɔ_�������ܵ�Ҫ�� �@һ��Ҫ�l������
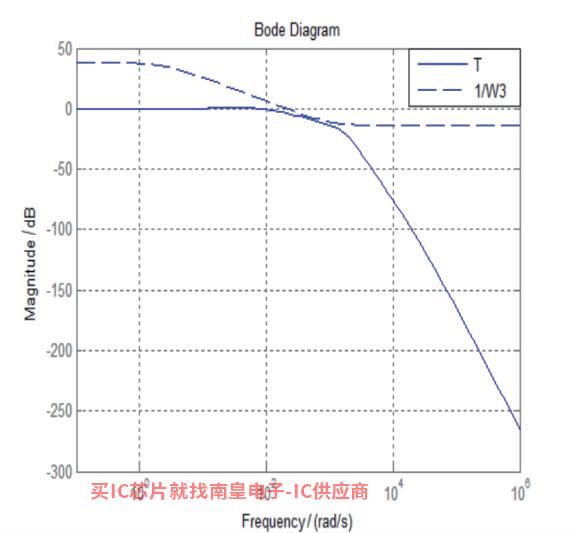
�@һ��Ҫ�l������ �ĈD7(a) �OӋ�Ŀ������M��ϵ�y����Ҫ��W3T���M��ϵ�y���������Ե�Ҫ��
�ĈD7(a) �OӋ�Ŀ������M��ϵ�y����Ҫ��W3T���M��ϵ�y���������Ե�Ҫ�� �@һ��Ҫ�l�������M��
�@һ��Ҫ�l�������M�� �ĈD7(b) �ĈD�п��Կ��������l���������a�`���Ⱥ������OӋ�Ŀ������M����ϵ�y���ܵ�Ҫ��
�ĈD7(b) �ĈD�п��Կ��������l���������a�`���Ⱥ������OӋ�Ŀ������M����ϵ�y���ܵ�Ҫ��

�D8 H����ϵ�y�_�h���f���������Ŀ�����
�ĈD8 ���Կ�����ϵ�y�Ľ�ֹ�l�ʦ�c =149 rad / s����λԣ�Ȟ�74.8�㣬�M���������Ⱥͷ����Ե�Ҫ���l��ϵ�y-60 dB/dec���@����ϵ�y����ǟo�o��ϵ�y���������õķ����ԣ����ڵ��l�η�ֵؐ�ߣ����Ա��Cϵ�y�ķ������ȣ����l��-20 dB/dec ���^0 dB ������һ���Č��ȣ�����λԣ��Ҳ���Կ���ϵ�y�����Ժã����l��ϵ�y���ܞ�-60 dB/dec���@����ԓϵ�y�������õ�������������
(a)����ݔ�����A�S푑���
(b)����ݔ���ڸɔ_������
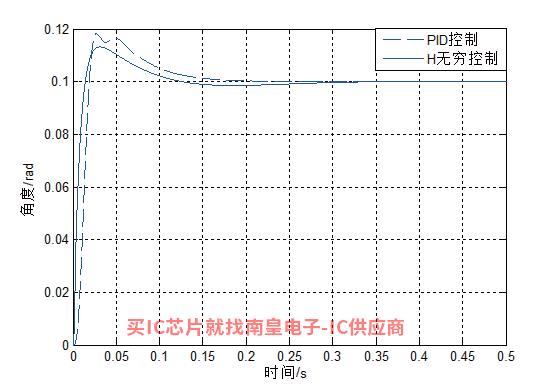
�D9 ϵ�y푑�����
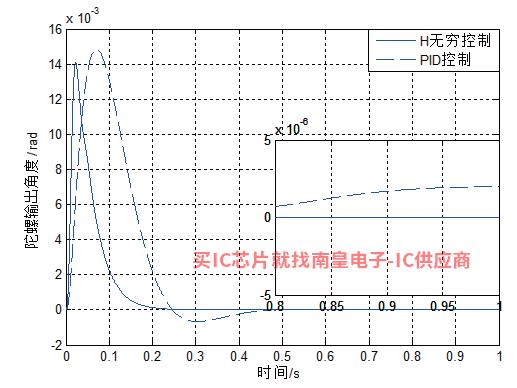
��H���Ʒ����·ݔ��0.1 rad�A�S��̖��0.5 N��m �ɔ_���أ�ϵ�y푑�������
�ĈD9 ��Ҋ������H�� ���ƺ�ϵ�y���{���H��13.7%���{���r�g�H��0.089 s��ݔ�볣ֵ�ɔ_���غ����·�����ֵ
��ӑB�ɔ_�`���0.013 7 rad�� ���B�`��څ��0��PID ���ƺ�H�� ���ȿ��ƣ����Կ���ϵ�y�ij��{�����{���r�g�Ϳ��ɔ_�������������@����ߡ�
6 �Y�Z
���đ���H�� ����`���ȿ��Ʋ��Կ���Һ�����ݵķ����·��ͨ�^�x����m�ļәຯ�������ƽY���@������˸�ۙ�Ϳ��_�ԡ�ͨ�^ģ�M��CH�� �c���y��������ȣ��������ķ����·����PID �p�h�������ķ����·���и��õĸ�ۙ�ԺͿ��_�ԣ��Ķ��C����ԓ��������Ч�ԡ�
�����īI��
[1] ����Ԫ.�T�Ԍ���[M].����:2006��ƌW������.
[2] ���F��.H������Փ������[M].���������A��W�����磬1996.
[3] Ѧ����.Ӌ��C�o���OӋ����ϵ�y-MATLAB�Z�Լ�����[M].������2012�����A��W������.
[4] ������.���MPID����MATLAB����[M].3��.������2011����ӹ��I������.
[5] ����|����W��.H�����������мә��ꇵ��x��[J].1997:29-32.
[6] ���i�����l�h���������.ģ�M�о��T��ƽ�_������·�����N���Ʋ���[J].2010(3):672-676��691.
(���ā�Դ��IC2021��1�£������s־


















- Ӣ�ؠ��c�Ų��Ƽ��y�ִ����ƄәC���˽�Q�����������ǻ�δ��
- 5nm���¹�ˇ���ʵ� ���ǣ��������Ї��͑�
- SK����ʿ�c������Ʌf�̣��_����һ��Ȟ��Ї����S�ṩ�O�䣬�o���S��
- �@�������۵�С�������ڼ��ق��y��܇��˥�䣿
- ��B���r���Ƽ�����Ҫ��
- Imagination��Visidon���_�l������ȌW���ij��ֱ��ʼ��g
- �������W�{��:15%���˛]���ϾW
- ������24Gbps GDDR6�@�� �x����һ���߶��@��
- Qorvo UWB ��Q�����@ Apple U1 ���������J�C
- ���T��ܛ���UչXcelerator �����ս�Q���� �ӿ����M SaaS �I���D��
- �������棬����������У�W��̽������
- ����оƬ�ĵ���������W�аlOPA�O�� �������_���Ԍ��F���ߵ�����
